工業(yè)機(jī)器人是指由機(jī)械手(機(jī)械體)、控制器、伺服驅(qū)動(dòng)系統(tǒng)和傳感裝置等組成,可由人操作、自動(dòng)控制和重新編程,并能在三維空間完成各種操作的光機(jī)電一體化生產(chǎn)設(shè)備。特別適用于多品種、多批次的柔性制造系統(tǒng)。
Industrial robots refer to opto electromechanical integrated production equipment composed of robotic arms (mechanical bodies), controllers, servo drive systems, and sensing devices, which can be operated, automatically controlled, and reprogrammed by humans, and can complete various operations in three-dimensional space. Especially suitable for flexible manufacturing systems with multiple varieties and batches.
,工業(yè)機(jī)器人根據(jù)手臂的運(yùn)動(dòng)形式分為四種類型:
Firstly, industrial robots are divided into four types based on the movement of their arms:
1.矩形臂可以沿三個(gè)直角坐標(biāo)移動(dòng);
1. The rectangular arm can move along three Cartesian coordinates;
2.圓柱坐標(biāo)臂可以提升、旋轉(zhuǎn)和伸展;
2. The cylindrical coordinate arm can be lifted, rotated, and extended;
3.球坐標(biāo)臂可以旋轉(zhuǎn)、俯仰和伸縮;
3. The spherical coordinate arm can rotate, pitch, and stretch;
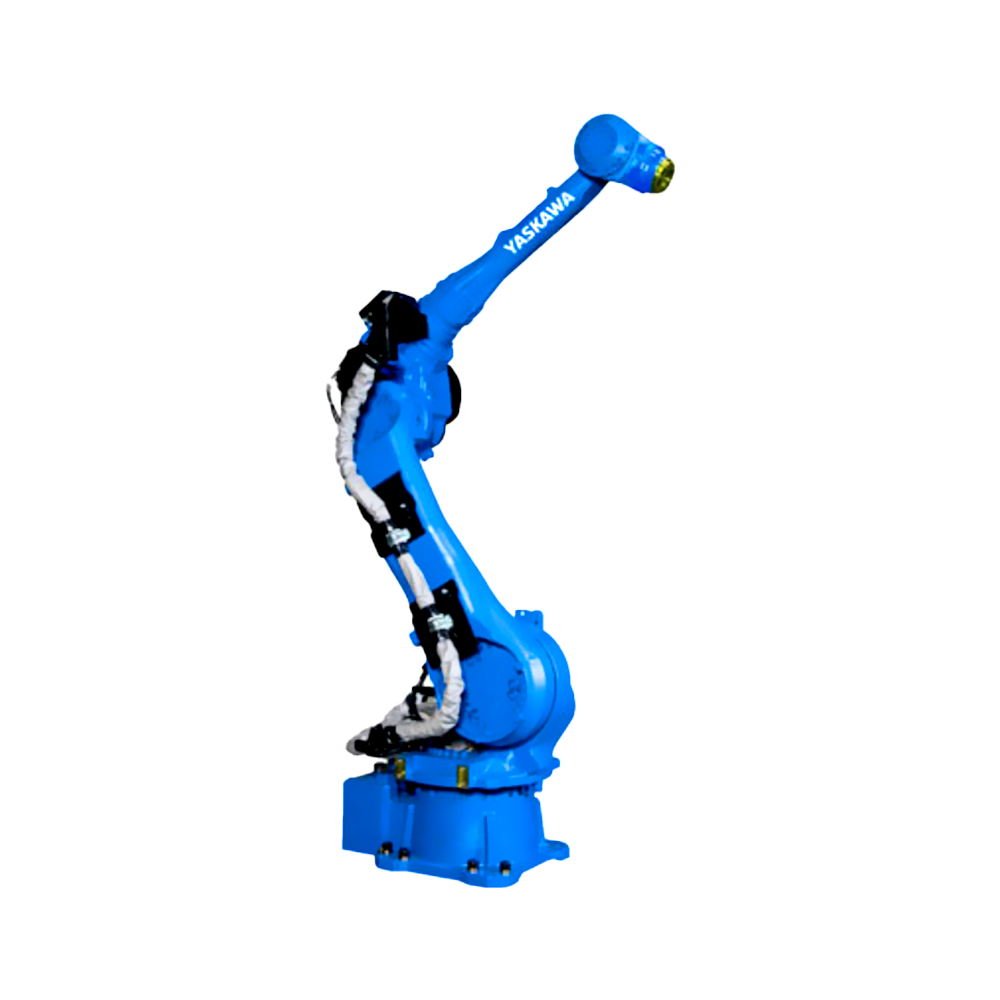
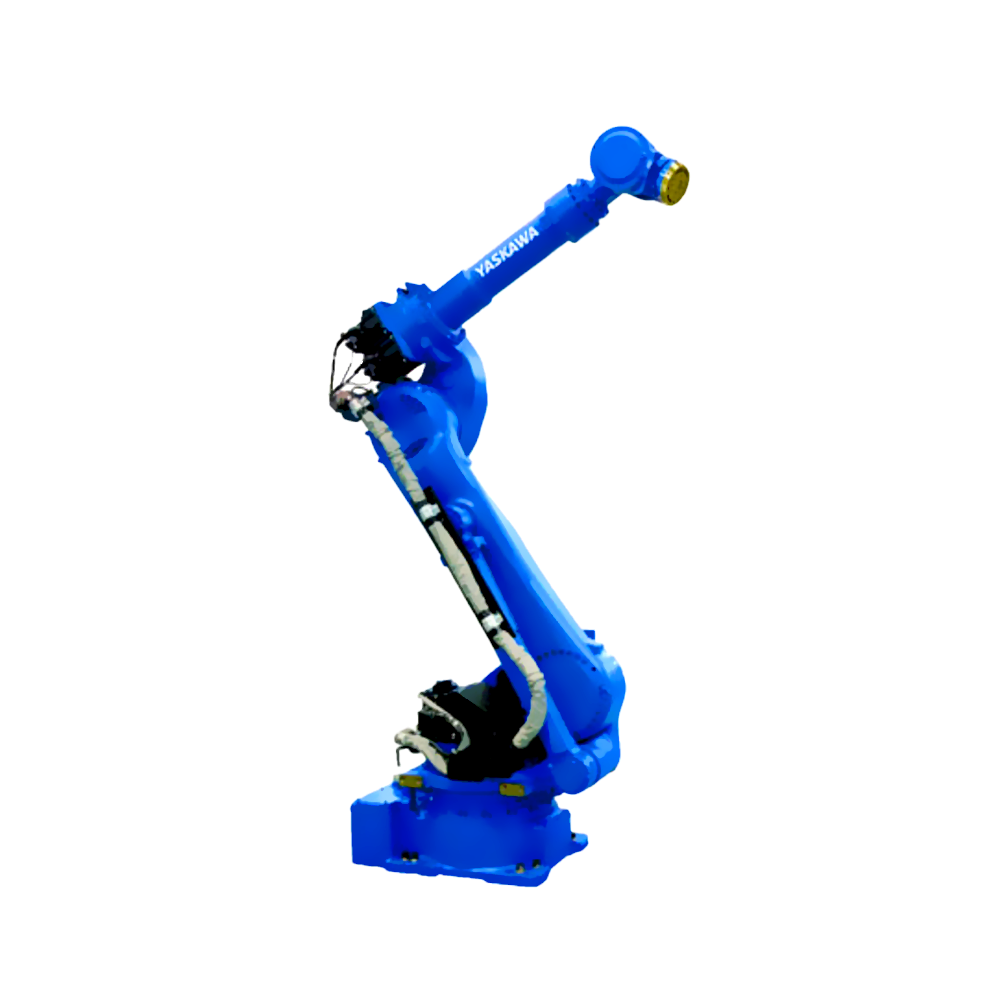
4.鉸接臂有多個(gè)旋轉(zhuǎn)接頭。
4. The articulated arm has multiple swivel joints.
工業(yè)機(jī)器人根據(jù)執(zhí)行機(jī)構(gòu)運(yùn)動(dòng)的控制功能可分為點(diǎn)式和連續(xù)履帶式。
Industrial robots can be divided into point type and continuous track type based on the control function of the actuator movement.

1.點(diǎn)式僅控制執(zhí)行機(jī)構(gòu)從一點(diǎn)到另一點(diǎn)的精確定位,適用于機(jī)床裝卸、點(diǎn)焊和一般搬運(yùn)、裝卸作業(yè);
1. Point type only controls the precise positioning of the actuator from one point to another, suitable for machine tool loading and unloading, spot welding, and general handling and loading and unloading operations;
2.連續(xù)軌道式可控制執(zhí)行機(jī)構(gòu)按照給定的軌道運(yùn)動(dòng),適用于連續(xù)焊接和噴漆作業(yè)。
2. The continuous track type controllable actuator moves according to the given track, suitable for continuous welding and painting operations.
3.工業(yè)機(jī)器人根據(jù)程序輸入方式可分為編程輸入型和教學(xué)輸入型:
3. Industrial robots can be divided into programming input type and teaching input type according to the program input method:
1.編程輸入類型為通過RS232串口或以太網(wǎng)將計(jì)算機(jī)上已編程的操作程序文件傳輸機(jī)器人控制柜。
1. The programming input type is to transfer the programmed operation program files on the computer to the robot control cabinet through RS232 serial port or Ethernet.
2.教學(xué)輸入類型有兩種教學(xué)方法:
There are two teaching methods for teaching input types:
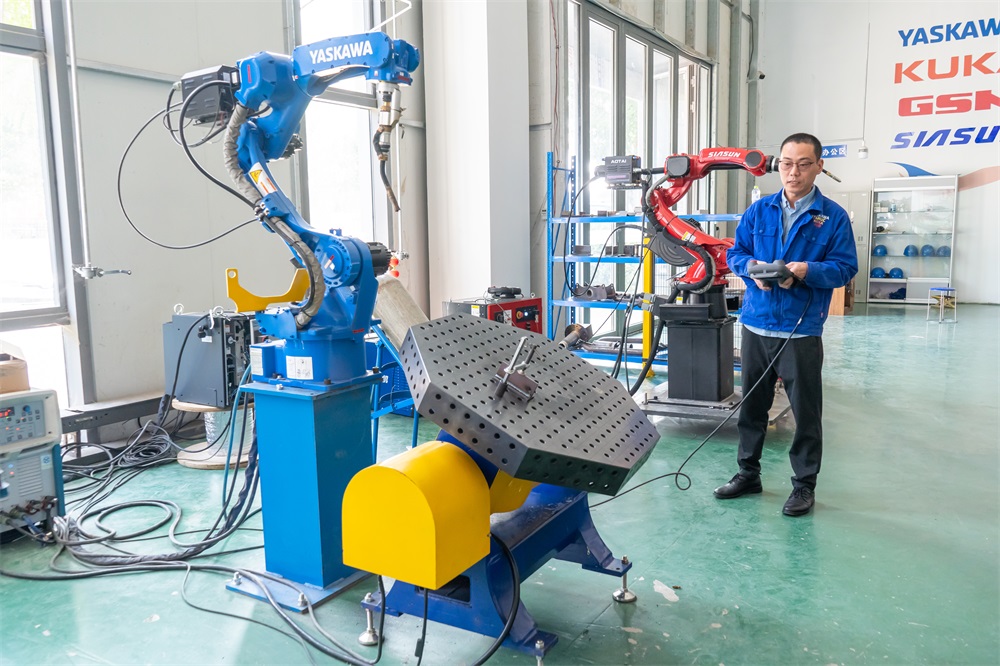
一是操作者利用手動(dòng)控制器(示教控制箱)將指令信號(hào)傳遞給驅(qū)動(dòng)系統(tǒng),使執(zhí)行機(jī)構(gòu)按照所需的動(dòng)作順序和運(yùn)動(dòng)軌跡執(zhí)行一次;
One is that the operator uses a manual controller (teaching control box) to transmit command signals to the driving system, so that the executing mechanism can execute once according to the required action sequence and motion trajectory;
另一種是操作者直接引導(dǎo)執(zhí)行機(jī)構(gòu)按照要求的動(dòng)作順序和軌跡再次執(zhí)行。在教學(xué)過程中,工作程序的信息自動(dòng)存儲(chǔ)在程序存儲(chǔ)器中。當(dāng)機(jī)器人自動(dòng)工作時(shí),控制系統(tǒng)從程序存儲(chǔ)器中檢測相應(yīng)的信息,并將指令信號(hào)傳送給驅(qū)動(dòng)機(jī)構(gòu),使執(zhí)行機(jī)構(gòu)能夠再現(xiàn)所示教的各種動(dòng)作。教授輸入程序的工業(yè)機(jī)器人被稱為教學(xué)
Another approach is for the operator to directly guide the executing mechanism to execute again according to the required action sequence and trajectory. During the teaching process, the information of the work program is automatically stored in the program memory. When the robot operates automatically, the control system detects corresponding information from the program memory and transmits command signals to the driving mechanism, enabling the executing mechanism to reproduce various actions taught. Industrial robots that teach input programs are called teaching
具有觸覺、力覺或簡單的視覺的工業(yè)機(jī)器人,能在較為復(fù)雜的環(huán)境下工作;如具有識(shí)別功能或更進(jìn)一步增加自適應(yīng)、自學(xué)習(xí)功能,即成為智能型工業(yè)機(jī)器人。它能按照人給的“宏指令”自選或自編程序去適應(yīng)環(huán)境,并自動(dòng)完成更為復(fù)雜的工作。
Industrial robots with tactile, force, or simple vision, capable of working in complex environments; If it has recognition function or further adds adaptive and self-learning function, it becomes an intelligent industrial robot. It can adapt to the environment by selecting or programming according to the "macro instructions" given by humans, and automatically complete more complex tasks.
本文由工業(yè)機(jī)器人友情奉獻(xiàn).更多有關(guān)的知識(shí)請點(diǎn)擊:http://www.umean.cn真誠的態(tài)度.為您提供為的服務(wù).更多有關(guān)的知識(shí)我們將會(huì)陸續(xù)向大家奉獻(xiàn).敬請期待.
This article is dedicated by industrial robots. For more related knowledge, please click: http://www.umean.cn Sincere attitude. We will provide you with comprehensive service. We will gradually contribute more relevant knowledge to everyone. Stay tuned