山東軒燁機器人科技有限公司是一家以工業機器人以及自動化非標設備于一體的技術企業,公司致力于焊接、切割、機器人機床上下料等領域的機器人智能化研究和產業化應用
查看更多+


公司立足于高端裝備制造等戰略新興產業,將追逐“制造2025"致力于機器人技術和互聯網技術的深度融合,推動智造。
查看更多+
發布:2024-05-09 瀏覽:0
機械手臂通常由3~7個關節組成,關節數量的多少取決于機械手臂的設計和用途。
A robotic arm typically consists of 3-7 joints, and the number of joints depends on the design and purpose of the robotic arm.
一、機械手臂是什么?
1、 What is a robotic arm?
機械手臂是一種運動自由度較高、能夠模擬人手動作的機電設備。它由多個關節、動力、控制系統、執行器和傳感器等部件組成,可以實現復雜的動作,代替人工完成生產或服務任務。機械手臂廣泛應用于自動化生產、倉儲物流、醫療護理、交通運輸等領域。
A robotic arm is an electromechanical device with high degrees of motion and the ability to simulate human hand movements. It consists of multiple joints, power, control systems, actuators, sensors, and other components, which can achieve complex actions and replace manual production or service tasks. Mechanical arms are widely used in fields such as automated production, warehousing and logistics, medical care, and transportation.
二、機械手臂的關節構成
2、 Joint composition of robotic arms
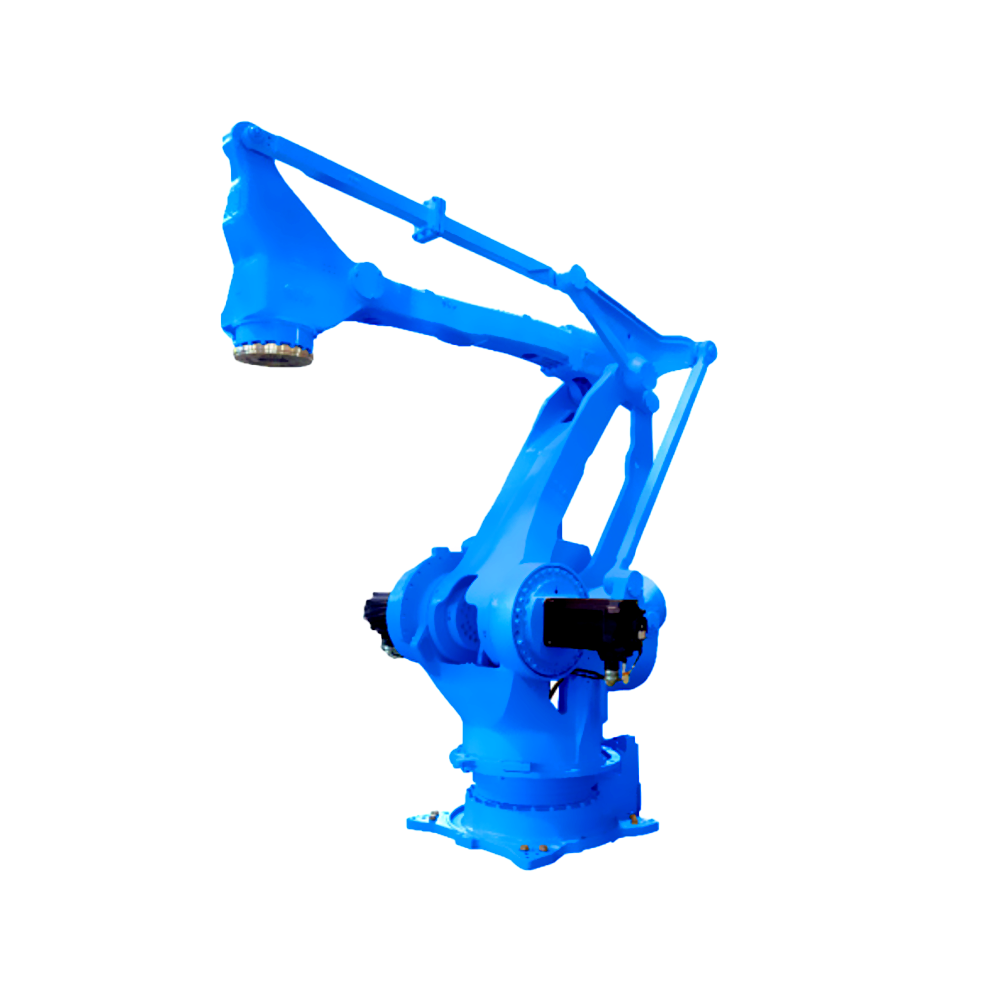
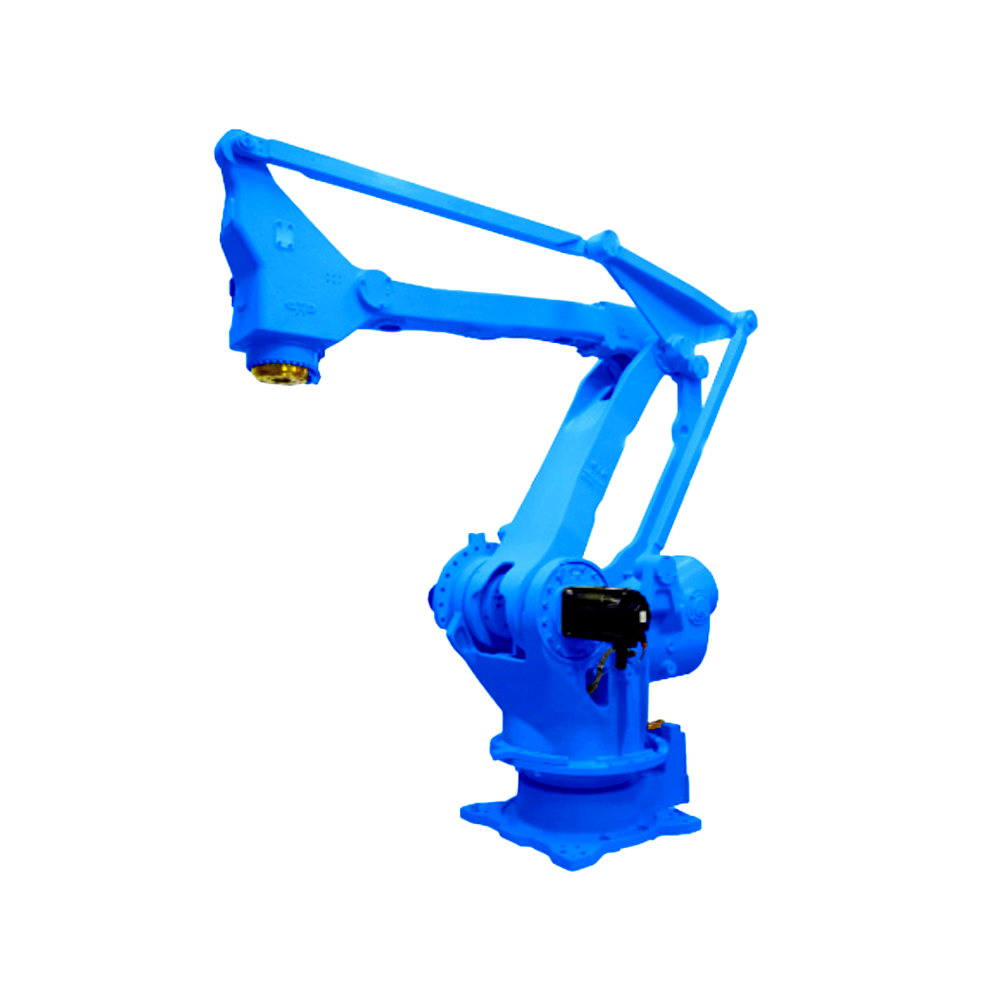
機械手臂由多個關節和運動軸組成,每個關節及運動軸都有不同的運動方式和限制。通常,機械手臂的關節數量在3~7個左右,關節數量的多少取決于機械手臂的設計和用途。以下是幾種常見機械手臂的關節構成:
A robotic arm consists of multiple joints and motion axes, each with different motion modes and limitations. Usually, the number of joints in a robotic arm is around 3-7, and the number of joints depends on the design and purpose of the robotic arm. The following are the joint compositions of several common robotic arms:
1. 3自由度幾何結構:由3個旋轉關節構成,每個關節繞不同的軸轉動,可以在3個方向上實現運動。
1. 3 degrees of freedom geometric structure: composed of 3 rotating joints, each joint rotates around different axes and can achieve motion in 3 directions.
2. SCARA型機械手臂:由3或4個關節組成,即1個旋轉關節和2或3個平移關節,可實現水平平移、垂直上下、旋轉和伸縮等多種運動。

2. SCARA type robotic arm: composed of 3 or 4 joints, namely 1 rotary joint and 2 or 3 translational joints, it can achieve various movements such as horizontal translation, vertical up and down, rotation, and extension.
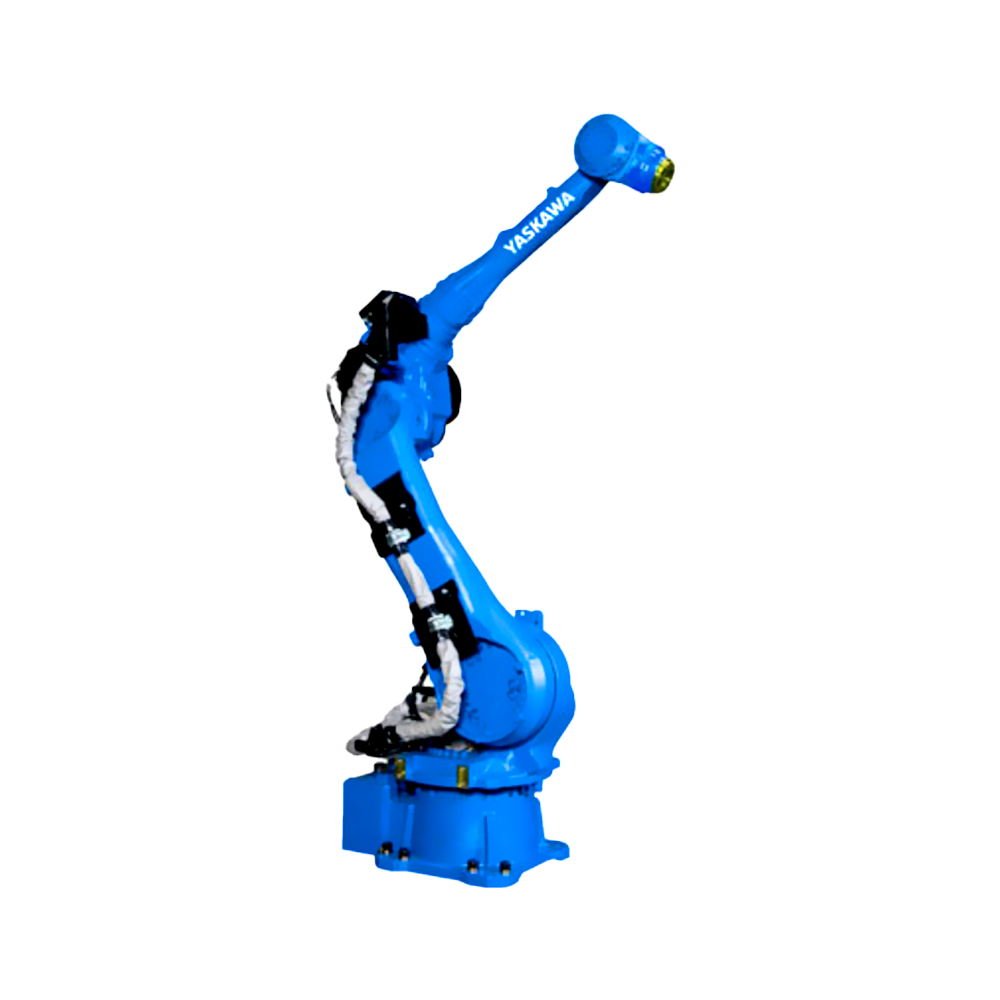
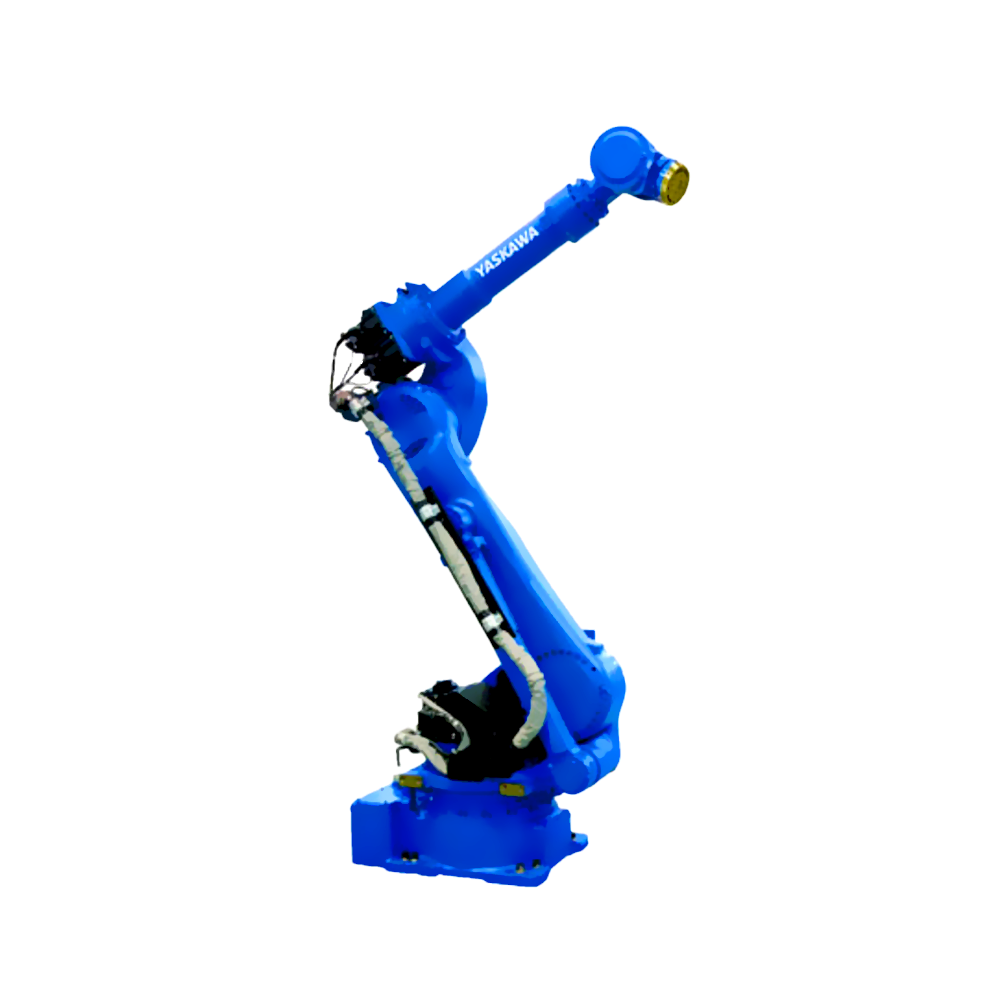
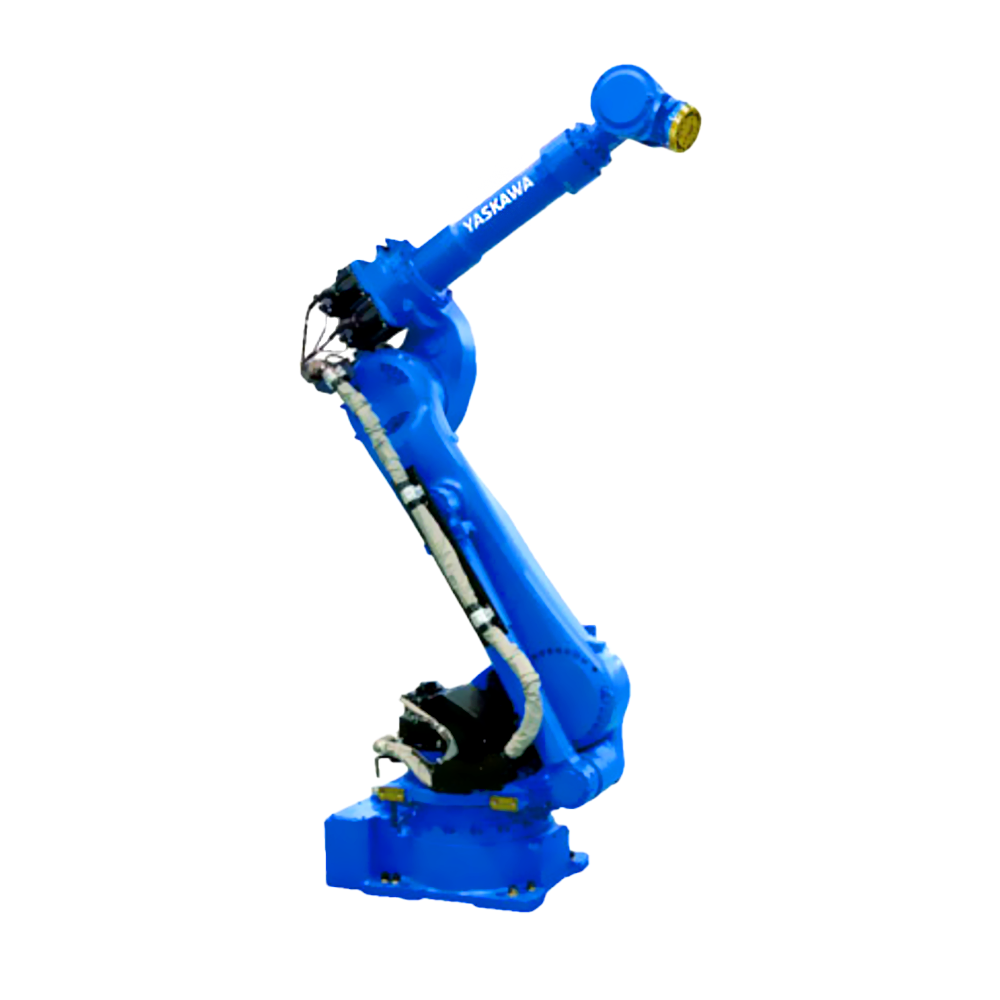
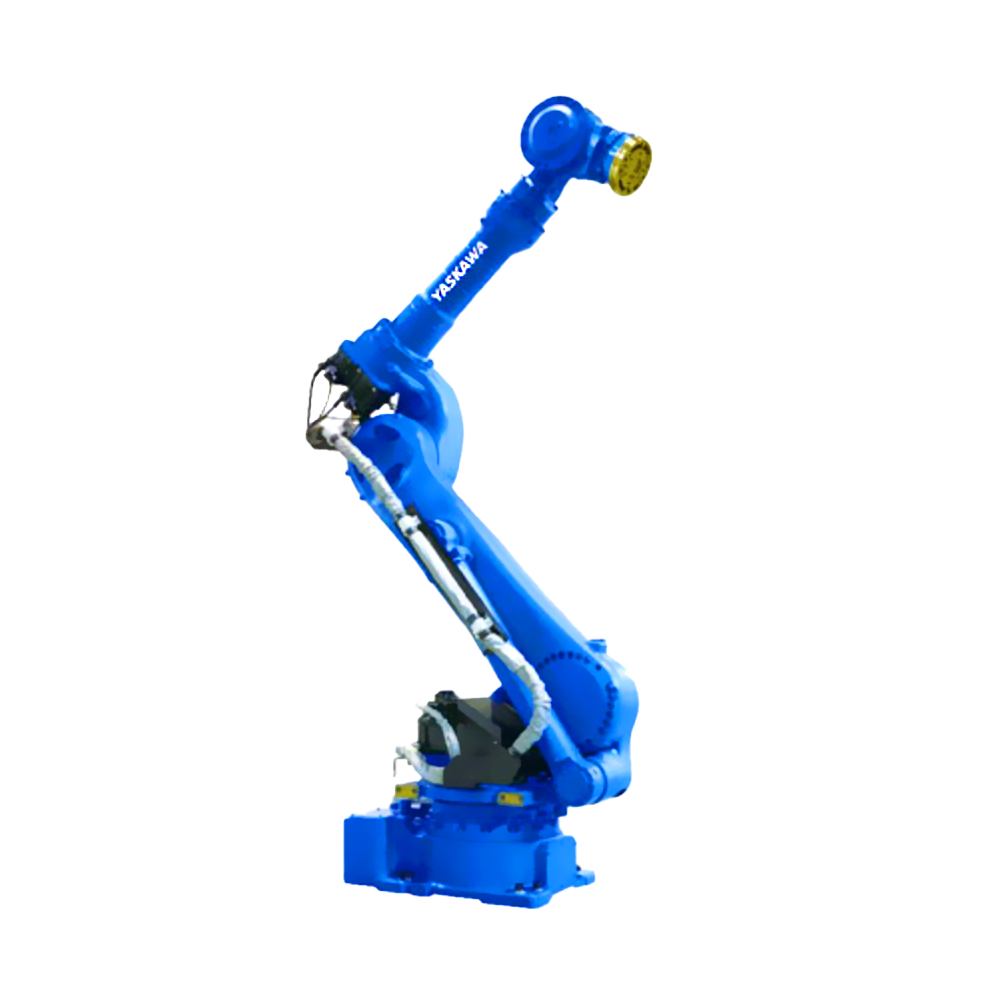
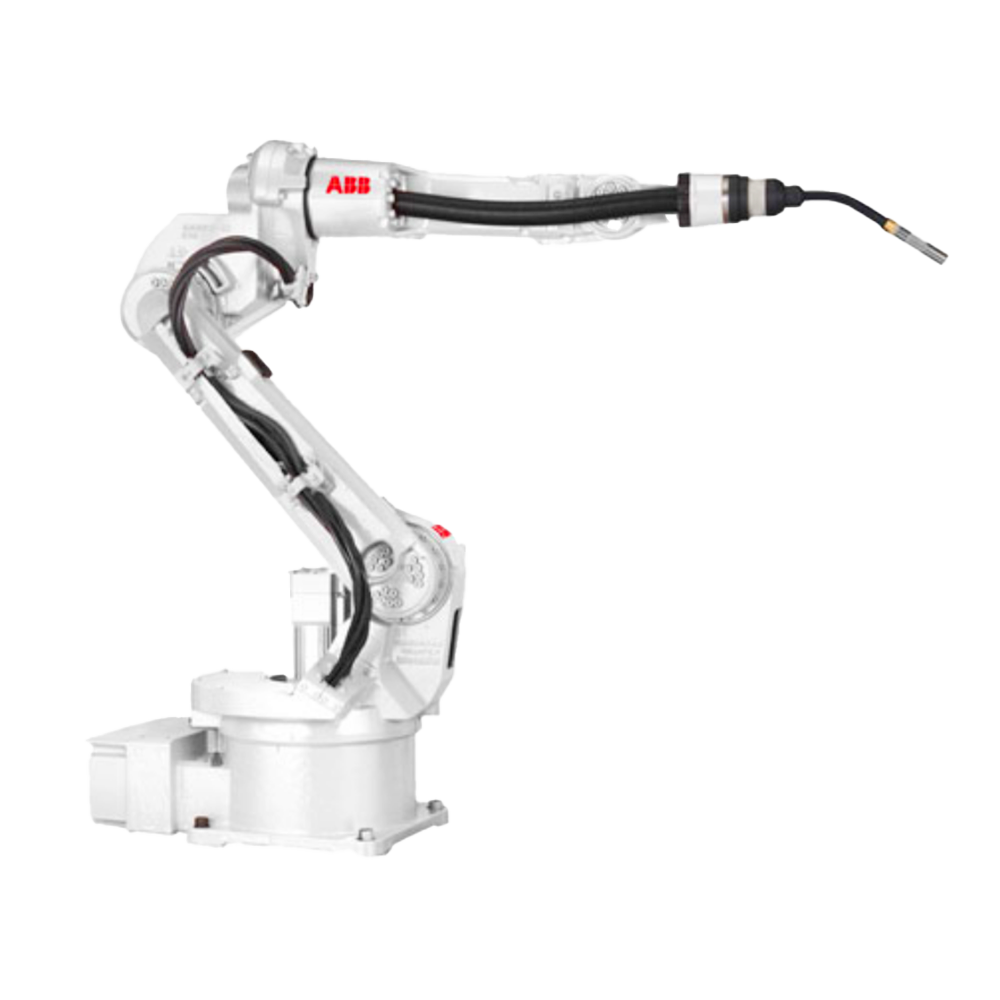
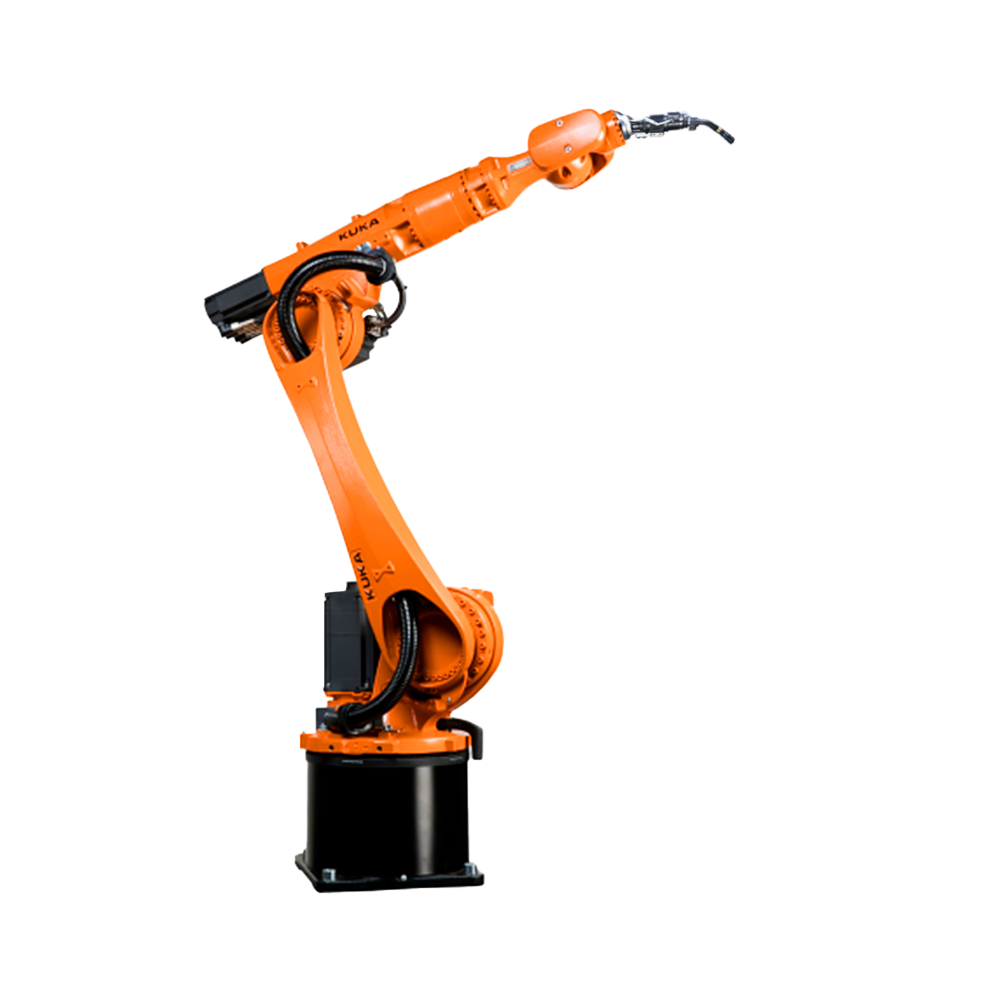
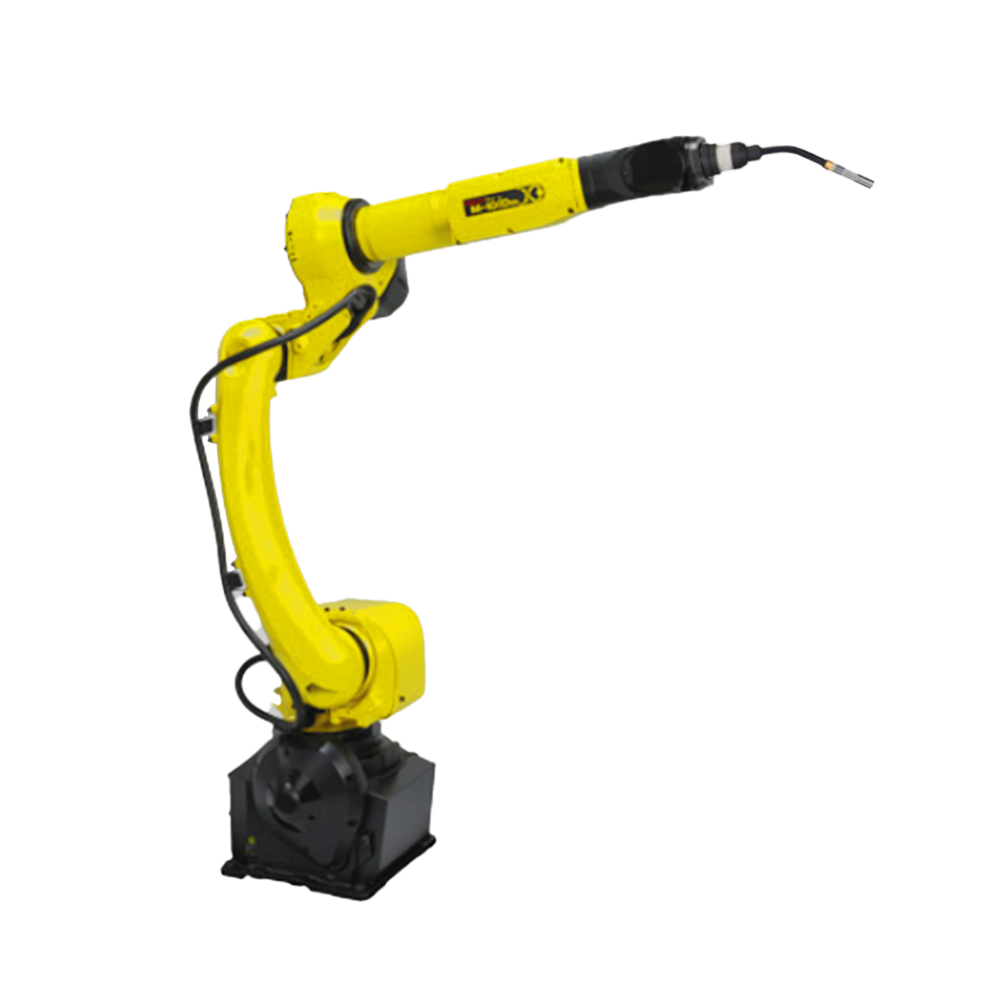
3. 6軸機械手臂:由6個關節構成,分別為旋轉關節和伸直關節,可實現6個自由度的運動,機械手臂在X、Y、Z三個方向上分別具有旋轉和伸縮的能力。
3. 6-axis robotic arm: composed of 6 joints, namely rotation joint and extension joint, capable of achieving 6 degrees of freedom of movement. The robotic arm has the ability to rotate and stretch in the X, Y, and Z directions.
三、機械手臂關節的功能
3、 The function of robotic arm joints
機械手臂的每個關節都有特定的功能和工作原理:
Each joint of a robotic arm has specific functions and working principles:
1. 旋轉關節:可以實現繞一個軸的旋轉運動,如3自由度幾何結構和6軸機械手臂的關節。
1. Rotary joint: It can achieve rotational motion around an axis, such as the joint of a 3-degree-of-freedom geometric structure and a 6-axis robotic arm.
2. 平移關節:可以實現沿一個方向的直線運動,如SCARA型機械手臂的關節,可用來控制機械臂的平移和伸縮。
2. Translation joint: It can achieve linear motion in one direction, such as the joint of SCARA type robotic arm, which can be used to control the translation and extension of the robotic arm.
3. 伸直關節:通常用于6軸機械手臂上,可以實現機械臂在Z軸上的伸縮運動,使機械臂能夠在不同位置和高度上取得物品。
3. Elongation joint: usually used on 6-axis robotic arms, it can achieve the extension and contraction movement of the robotic arm on the Z-axis, allowing the robotic arm to obtain objects at different positions and heights.
四、總結
4、 Summary
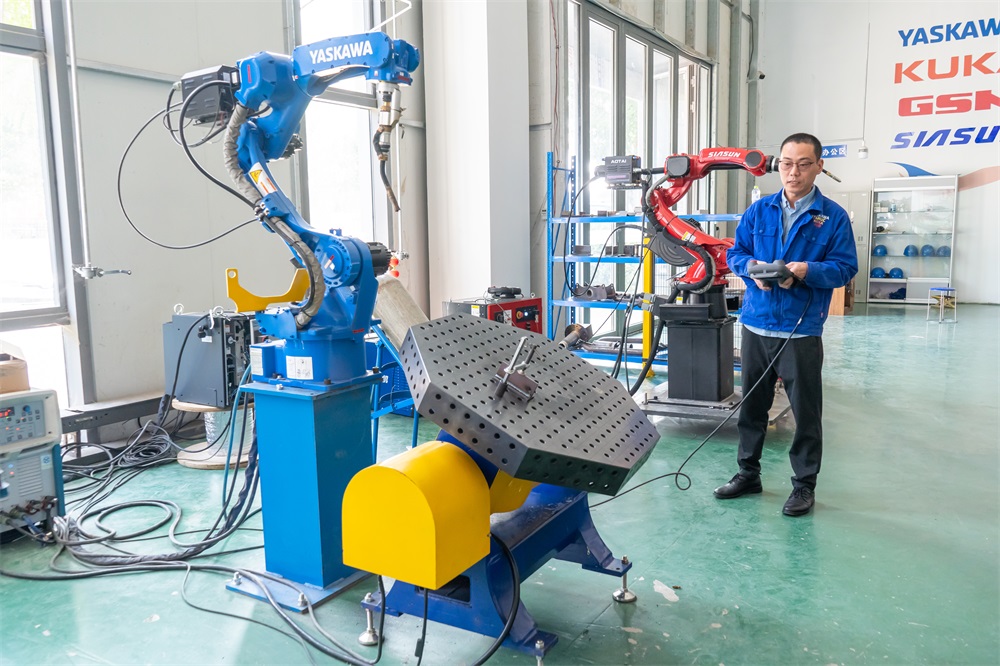
機械手臂是自動化生產和服務中不可或缺的設備,在實際應用中具有廣泛的優勢。了解機械手臂的關節構成和功能對于設計和維護機械手臂都非常重要。
Mechanical arms are indispensable equipment in automated production and services, and have broad advantages in practical applications. Understanding the joint composition and function of robotic arms is crucial for designing and maintaining them.
本文由焊接機械手臂提供技術支持,更多的詳細精彩內容請點擊我們的網站http://www.umean.cn我們將會全心全意為您提供滿意的服務。
This article is supported by welding robotic arms. For more detailed and exciting content, please click on our website http://www.umean.cn We will wholeheartedly provide you with satisfactory service.
 微信二維碼
微信二維碼  抖音二維碼
抖音二維碼
咨詢熱線:0531-82766496
15553199811(微信同號)
山東省濟南市歷城區工業北路5777號中電建能源谷4-B-4
dongjinchuang@126.com
截屏,微信識別二維碼